
در این مقاله به سؤالات زیر پاسخ داده شده است:
1) مشکلات و کاستی روشهای سنتی نظارت در پروژههای صنعت ساخت کدامند؟
2) فناوری دوربینهای RGB-D چگونه به نظارت پیشگیرانه و انطباق با BIM کمک میکند؟
3) چالشهای اصلی استقرار این فناوری در پروژه و راهکارهای برطرفکردن آنها کدام است؟
نظارت هوشمند پروژههای صنعت ساخت با پیادهسازی دوربینهای RGB-D
پروژههای صنعت ساخت به دلیل وجود ماهیت پویا، غیرخطی و وابسته شدید به هماهنگی میان رشتههای مختلف، همواره با چالشهایی نظیر دوبارهکاری، انحراف از برنامه زمانبندی و فقدان ادراک لحظهای از وضعیت پروژه مواجه هستند. روشهای سنتی مبتنی بر بازدیدهای دورهای، چکلیستهای کاغذی و گزارشهای دستی، دیگر پاسخگوی پیچیدگی و سرعت تغییرات در پروژههای مدرن نیستند. فناوری دوربینهای عمقسنج RGB-D به عنوان ابزاری کلیدی برای ایجاد یک «لایه دیجیتال زنده» عمل کرده و تلفیق دادههای سهبعدی حاصل با الگوریتمهای یادگیری عمیق و مدل اطلاعات ساخت (BIM) میتواند ضمن کاهش چشمگیر انحرافات اجرایی، بهینهسازی لجستیک و مستندسازی خودکار پیشرفت فیزیکی را نیز به همراه داشته باشد. این مقاله با معرفی چالشهای عملی استقرار این فناوری ازجمله گردوغبار، انسداد، سطوح بازتابنده و بار پردازشی، راهکارهای مهندسی متناسب با محیط پروژه ارائه داده و با نگاهی کاربردی، نقشه راهی را برای انتخاب و پیادهسازی سامانههای نظارت مبتنی بر بینایی سهبعدی فراهم میکند.
1. چرا روشهای سنتی نظارت دیگر پاسخگوی نیازهای صنعت ساخت نیستند؟
مدیریت یک پروژه مدرن، بهویژه در مقیاس بزرگ، با انبوهی از جریانهای اطلاعاتی پراکنده، تصمیمگیریهای وابسته به ذهنیت افراد و شکاف میان مدل طراحی و وضعیت اجرا دستوپنجه نرم میکنند. مطالعات نشان داده است که درصد قابلتوجهی از انحرافات ابعادی، ناهماهنگیهای زمانی و اتلاف منابع، به دلیل فقدان یک سامانه پایش پیوسته و خودکار به وجود میآیند. روشهای سنتی رایج مانند بازدیدهای هفتگی، عکسبرداری با دوربینهای معمولی و چکلیستهای دستی، سه نقص اساسی دارند:
- واکنشی بودن: خطا معمولاً پس از اجرا و گاهی پس از تحمیل هزینههای سنگین شناسایی میشود.
- وابستگی به بازرسی انسانی: کیفیت ثبت دادهها و تحلیل آنها تحتتأثیر تجربه، خستگی و خطای دید بازرس قرار دارد.
- عدم پیوستگی زمانی: بازدیدهای دورهای تصویری مقطعی و گسسته ارائه داده و تغییرات سریع پروژه در بین دو بازدید را نادیده میگیرند.
برای عبور از این محدودیتها، نیاز به الگوی نظارت پیشگیرانه، پیوسته و خودکار احساس میشود. چنین الگویی بر سه رکن «ثبت لحظهای و دقیق محیط»، «درک خودکار وضعیت موجود در مقایسه با وضعیت مطلوب» و «صدور هشدار یا اقدام اصلاحی در کمترین زمان ممکن» استوار است. در این میان، فناوری دوربینهای عمقسنج RGB-D به دلیل توانایی منحصربهفرد در تولید همزمان تصویر رنگی (RGB) و نقشه عمق (Depth – D)، دقیقاً همان حسگری است که میتواند نیاز به «داده سهبعدی در لحظه» را برآورده سازد. برای آشنایی بیشتر با نقش تکنولوژی و فناوری، مقاله "فناوری و نوآوری در صنعت مهندسی و ساخت" را مطالعه نمایید. در ادامه، به تشریح ساختار این فناوری و روشهای استفاده، چهارچوب عملیاتی و کاربردهای مدیریتی آن در صنعت ساخت میپردازیم.

2. دوربین RGB-D و ایجاد لایههای اطلاعاتی
دوربینهای صنعتی و تجاری متداول (وبکم، دوربینهای مداربسته معمولی) تنها قادر به ثبت یک تصویر دوبعدی از میدان دید هستند. در چنین تصویری، اطلاعات «فاصله» اشیا از دوربین بهکلی از بین میرود. این نقص باعث میشود نتوان ابعاد واقعی، موقعیت مکانی دقیق و روابط فضایی میان اشیا را استخراج کرد. بهعنوانمثال، در یک تصویر RGB ساده، تشخیص اینکه یک کارگر در پشت یک تیر بتنی قرار دارد یا در مقابل آن، غیرممکن است.
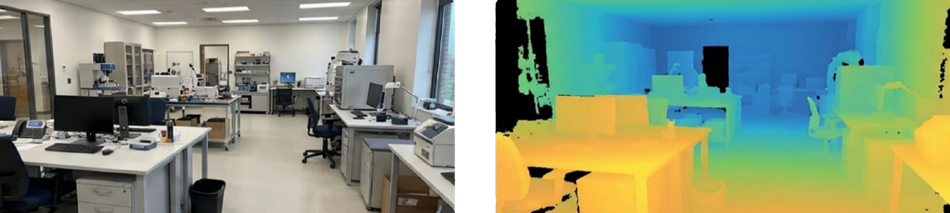
فناوری RGB-D این مشکل را با افزودن یکلایه اضافی به نام «نقشه عمق» پر میکند. هر پیکسل در این نقشه، مانند شکل 1، فاصله آن نقطه از دوربین را بر حسب میلیمتر یا سانتیمتر نشان میدهد. با ترکیب لایه رنگ (ظاهر اشیاء) و لایه عمق (موقعیت فضایی)، یک «ابرنقطه سهبعدی» تولید میشود که مدلی واقعی و مقیاسدار از صحنه است. این قابلیت، دقیقاً همان چیزی است که برای ایجاد یک کپی دیجیتال زنده (دوقلوی دیجیتال) از پروژه ساختمانی لازم داریم. با نصب چند دوربین RGB-D در نقاط استراتژیک و ادغام ابرنقاط حاصل، میتوان در هر لحظه مدل سهبعدی بهروزی از کل پروژه داشت و آن را با مدل BIM طراحی مقایسه کرد.
شکل 1: تبدیل تصویر تخت به نقشه عمق به وسیله دوربین RGB-D
3. انتخاب آگاهانه فناوریهای اصلی سنجش عمق
دوربینهای RGB-D موجود در بازار بر پایهیکی از سه فناوری اصلی یا ترکیبی از آنها کار میکنند. شناخت نقاط قوت و ضعف هر کدام برای انتخاب ابزار مناسب بر اساس نوع پروژه حیاتی است.
1.3. نور ساختاریافته (Structured Light)
در این روش، فرستنده الگوی ثابتی از نقاط یا خطوط مادونقرمز را روی صحنه تابانده و یک دوربین مجزا، تغییر شکل این الگو بر روی سطوح سهبعدی را ثبت کرده و با مثلثبندی، نقشه عمق را محاسبه میکند. از نقاط قوت این روش میتوان بهدقت بالا در فواصل کوتاه (3 الی 4 متر) و هزینه نسبتاً پایین اشاره کرد. این روش محدودیتهایی مانند حساسیت به نور محیطی (بهویژه نور خورشید) یا کاهش دقت در بردهای بلند را نیز دارد که آن را برای استفاده در فاصله نزدیک و محیطهای داخلی سرپوشیده مناسب میسازد.
2.3. زمان پرواز (Time-of-Flight – ToF)
این فناوری مشابه رادار نوری عمل میکند. به عبارتی، دوربین پالسهای مدولهشده نور مادونقرمز منتشر کرده و با اندازهگیری زمان رفتوبرگشت هر پالس، فاصله هر نقطه را محاسبه میکند. این روش دارای برد مؤثر تا ۱۰-۲۰ متر (در مدلهای صنعتی بیشتر)، مقاومت خوب در برابر نور محیط و نرخ فریم بالا (مناسب برای صحنههای پویا) است؛ هرچند که هزینه سختافزاری بالاتر و مصرف انرژی بیشتر داشته و نیز احتمال تداخل در کاربردهای چند دوربین در آن وجود دارد؛ لذا برای پایش فضاهای نیمهباز و باز با ابعاد متوسط یا بلندمرتبهسازی مناسبتر است.
3.3. دید استریو (Stereo Vision)
در این روش که با الهام از چشم انسان ایجاد شده، دو دوربین معمولی RGB با فاصله مشخص از یک صحنه تصویربرداری کرده و الگوریتمهای تطابق پیکسلی، اختلاف منظر را محاسبه و نقشه عمق را استخراج میکنند. این فناوری نیاز به فرستنده فعال نداشته و فقط به نور محیط وابسته است؛ لذا عملکرد خوبی در فضای بازداشته و در صورت استفاده از سنسورهای ارزان، هزینه متوسط را در برخواهد داشت. این فناوری نیز مانند سایر فناوریهای محدودیتهایی از جمله وابستگی شدید به بافت و الگوی سطح، دقت پایین در فواصل نزدیک و نیاز به توان محاسباتی بالا دارد.
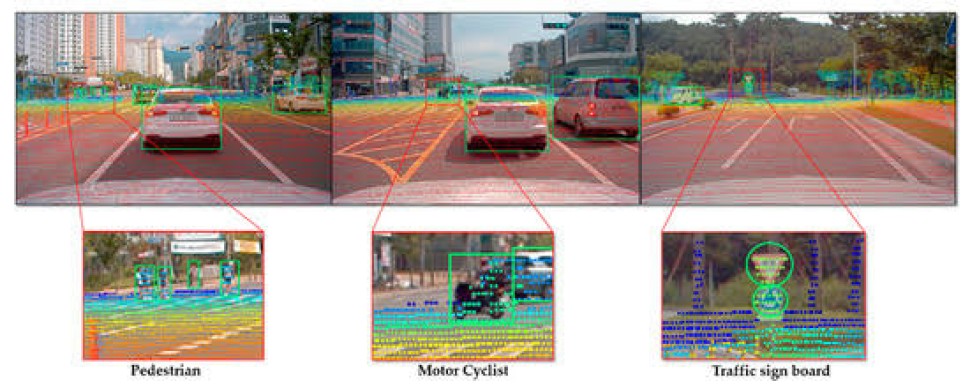
بسیاری از محصولات تجاری (مانند سری Intel RealSense، OAK-D و Azure Kinect) همانند شکل 2 از رویکردهای ترکیبی (مانند استریو فعال به همراه پرتابکننده نور ساختاریافته) برای جبران نقاط ضعف هر روش استفاده میکنند. انتخاب نهایی همواره تابع چهار معیار محدوده فاصله نظارت، شرایط نوری، سرعت تغییرات صحنه و بودجه در دسترس است.
شکل 2: تفاوت تصویر دوربین RGB-D و دوربین RGB
4. مدیریت ساخت با پیادهسازی دوربین RGB-D
بهکارگیری مؤثر دوربینهای RGB-D در مدیریت ساخت نیازمند طیکردن سه گام پیوسته است که در ادامه به تشریح آن میپردازیم.
1.4. گام اول: برداشت هوشمند داده
دوربینها در نقاط کلیدی پروژه (ورودی/ خروجی اصلی، اطراف جرثقیلها، ایستگاههای بتنریزی، طبقات در حال احداث، انبارهای مصالح) نصب شده و بسته بهسرعت حرکت تجهیزات و افراد، نرخ فریم بین ۱۵ تا ۶۰ فریم بر ثانیه تنظیم میگردد. در این مرحله، مهمترین پارامترهای کیفی شامل میدان دید، دقت عمق (بر حسب میلیمتر یا درصد فاصله) و فاصله کاری مؤثر میباشند.
2.4. گام دوم: تحلیل معنایی توسط هوش مصنوعی (دَرک)
ابرنقاط خام و تصاویر رنگی، پیش از آنکه برای کاربر قابلاستفاده باشند، باید به «اشیای قابلشناسایی» تبدیل شوند. الگوریتمهای یادگیری عمیق (بهویژه شبکههای عصبی کانولوشنال) قادرند در لحظه موارد ذیل را تشخیص دهند:
- موقعیت سهبعدی کارگران، تجهیزات و مصالح،
- انطباق یا عدم انطباق ابعاد و موقعیت اعضای ساختهشده (مانند ستون، تیر، دال) با مدل BIM پروژه،
- تغییرات در انبار مصالح و مسیرهای تردد،
- وضعیت پیشرفت فیزیکی هر ناحیه از پروژه.
نتیجه این گام، برچسبگذاری معنایی صحنه و تولید یک خروجی غنی از دادهها (نوع شیء، مختصات، ابعاد، فاصله از مناطق بحرانی و...) است. برای آگاهی بیشتر از نقش BIM در پروژه، مقاله "چرا مدیران پروژه باید مدلسازی اطلاعات ساخت (BIM) را فرا بگیرند؟"
را مطالعه فرمایید.

3.4. گام سوم: اقدام هوشمند
بینش تولیدشده در گام دوم، بسته به نوع انحراف یا رویداد، میتواند طیف وسیعی از واکنشها را فعال کند که در ادامه به تعدادی از آنها اشاره شده است:
- نمایش وضعیت انطباق بر روی داشبورد مرکزی پروژه بهصورت برخط؛
- ارسال پیام هشدار به تبلت سرپرست اجرا یا مدیر ساخت همراه با عکس و مختصات دقیق اختلاف؛
- ثبت خودکار اختلاف در لاگ پروژه و افزودن آیتم به لیست دوبارهکاریهای احتمالی؛
- و در سطوح پیشرفتهتر، توقف خودکار حرکت جرثقیل هوشمند در صورت تشخیص ورود تجهیزات به منطقه ممنوعه.
این چرخه را میتوان «حلقه بسته نظارت و کنترل هوشمند» نامید که در آن فاصله بین «خطای اجرا» و «اقدام اصلاحی» به حداقل میرسد.
5. مهمترین کاربردهای دوربین RGB-D در صنعت ساخت
فناوری دوربینهای RGB-D، فراتر از مبانی فنی، چهار حوزه کلیدی را در مدیریت پروژههای صنعت ساخت متحول میکند که در ادامه به آنها میپردازیم.
1.5. بازرسی خودکار انطباق با BIM
بهجای بازرسیهای دورهای و اندازهگیری با متر و شاغول، سامانه ایجادشده در هر لحظه ابرنقاط سهبعدی پروژه را با مدل BIM مقایسه میکند. انحرافات جابهجایی ستون، ضخامت نادرست سقف، زاویه نامناسب دیوارهای برشی یا موقعیت اشتباه تأسیسات بلافاصله شناسایی و گزارش میشوند. این قابلیت بهتنهایی میتواند هزینه دوبارهکاری را تا حد زیادی کاهش دهد.
2.5. مستندسازی خودکار پیشرفت فیزیکی
با ثبت متوالی ابرنقاط، میتوان درصد پیشرفت واقعی هر فعالیت را به طور خودکار محاسبه کرد. مقایسه این درصد با برنامه زمانبندی اولیه، امکان هشدار زودهنگام را در مورد تأخیرها یا انحرافات فراهم میکند.
3.5. بهینهسازی لجستیک و جریان مصالح
ردیابی موقعیت لحظهای تریلیهای حمل مصالح، انبارهای موقت و جرثقیلهای برجی، ازدحام در راهروهای دسترسی را کاهش میدهد. همچنین با شناسایی مناطق پرتردد، میتوان چیدمان انبارها را بهینه کرده و از ایجاد بینظمی جلوگیری کرد.
4.5. پایش از راه دور در شرایط خطرناک
در پروژههای نفت، گاز، پتروشیمی یا تخریب، استفاده از دوربینهای مقاوم در برابر انفجار RGB-D، امکان بازرسی و نظارت را بدون حضور فیزیکی بازرس در منطقه پرخطر فراهم میکند. این موضوع هم ایمنی افراد و هم تداوم نظارت را تضمین مینماید.
در تمام موارد فوقالذکر، نگرانیهای مربوط به حریم خصوصی با استفاده از فناوریهای «پاکسازی چهره» یا «حالت اسکلتی» که تنها ساختار حرکتی فرد را بدون ثبت جزئیات ظاهری ذخیره میکند، به طور کامل قابلرفع است.
6. همافزایی فناوریهای RGB-D و LIDAR برای ایجاد تصویر کامل از پروژه
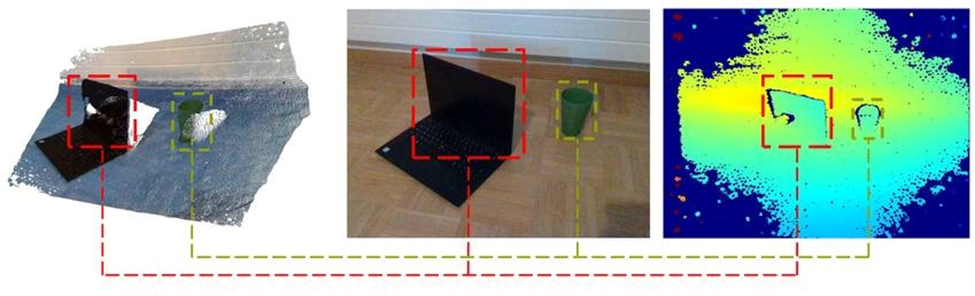
در پروژههای بسیار بزرگ مانند فرودگاهها، پالایشگاهها یا انبوهسازی، اتکا صرف به دوربین RGB-D کافی نیست. در این مقیاس، ترکیب فناوری LiDAR و دوربین RGB-D بهترین نتیجه را در پی خواهد داشت. LiDAR با برد چندصدمتری و دقت میلیمتری، برای نقشهبرداری از توپوگرافی زمین، اسکلت اصلی سازه و مسیریابی ماشینآلات سنگین ایدهآل بوده؛ اما فاقد اطلاعات رنگ و بافت است و تشخیص جزئیاتی مانند نوع مصالح، علائم هشدار روی دیوار یا وضعیت تجهیزات حفاظتی افراد با آن دشوار است. در مقابل، دوربین RGB-D در فواصل نزدیک تا متوسط (۱۰-۱۵ متر) جزئیات رنگی غنی و تشخیص اشیا را با هزینه کمتر ارائه میدهد. یک معماری عملیاتی استاندارد میتواند بهصورت نصب اسکنر LiDAR ثابت روی جرثقیل برجی برای اسکن کلی از کل سایت و نصب دوربینهای RGB-D در نقاط بحرانی (ورودی پروژه، زیر بار جرثقیل، طبقات در حال ساخت) با پایش ۲۴ ساعته باشد. ادغام خروجی این دو حسگر، مانند شکل 3، دوقلوی دیجیتال چندلایه با ایجاد هندسه بهوسیله LiDAR و دریافت جزئیات از RGB-D را تشکیل دهد.
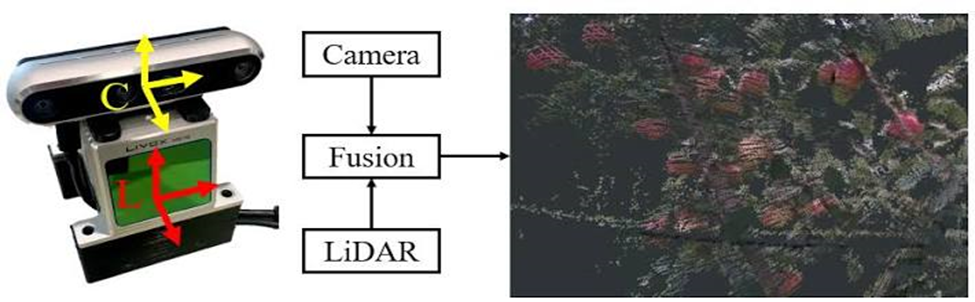
شکل 3: تصویر حاصل از ادغام دوبین RGB-D و اسکنر LiDAR
7. چالشهای استفاده از دوربین RGB-D و راهکارهای برطرفکردن آنها
علیرغم پتانسیل بالا، استقرار فناوری RGB-D در یک پروژه پر گردوغبار، مرطوب و شلوغ با چهار چالش اصلی روبروست:
- گردوغبار و رطوبت: بسیاری از دوربینهای RGB-D برای محیطهای تمیز آزمایشگاهی ساخته شدهاند که با استفاده از محفظههای دارای درجه حفاظت IP65 یا بالاتر به همراه سیستم واشر هوا برای پاکسازی مداوم لنز میتوان این مشکل را برطرف کرد.
- انسداد دید: در پروژههای فعال، همیشه بخشی از صحنه توسط کارگران، تجهیزات یا مصالح پنهان میشود. راهحل اساسی استفاده از چند دوربین با زوایای همپوشان و ادغام ابرنقاط آنهاست.
- سطوح بازتابنده و شفاف: شیشه، فلز صیقلی، کفپوش اپوکسی و آب باعث ایجاد بازتابهای کاذب میشوند. در این موارد استفاده از الگوریتمهای میانیابی و ترکیب دادههای استریو و زمان پرواز، خطا را تا حد زیادی جبران میکند.
- بار محاسباتی زیاد: پردازش جریان چندین دوربین 4K، در زمان واقعی نیازمند GPUهای قدرتمند و حافظه بالا است. رویکرد نوظهور پردازش لبه (Edge AI) که در آن بخشی از تحلیل روی خود دوربین انجام میشود و تنها متادیتا به سرور ارسال میگردد، این چالش را به طرز چشمگیری کاهش داده است.
8. افق آتی مبتنی بر پروژههای خودآموز و فرهنگ دادهمحور
گذر از نظارت سنتی به نظارت هوشمند، صرفاً یک تحول فنی نیست. تجربه میدانی نشان میدهد با درک تیم اجرایی از سامانههای بینایی ماشین که بهجای «کنترل تنبیهی» به «کمک بهموقع» میپردازند (مثلاً با هشدار زودهنگام قبل از وقوع خطا)، اعتماد متقابل شکلگرفته و فرهنگ «مسئولیتپذیری جمعی در برابر دادهها» نهادینه میشود. بهعبارتدیگر، موفقیت پایدار این فناوری در گرو طراحی چرخه مثبت «فناوری قابلاعتماد، اثبات سودمندی عملیاتی، اعتماد بین کارفرما و پیمانکار و تعهد به بهبود مستمر» است. باتوجهبه روندهای فنی، انتظار میرود در آینده هزینه حسگرهای زمان پرواز کاهشیافته، امکان یکپارچهسازی دادههای دوربین RGB-D با نرمافزارهای مدیریت پروژه فراهم شده و قابلیت شناسایی خودکار انحرافات از مدلهای اطلاعات ساخت، بدون نیاز به سرور مرکزی فراهم شود. در چنین چشماندازی، سامانههای نظارت مبتنی بر RGB-D بهتدریج به بخشی استاندارد از تجهیزات پروژههای متوسط و بزرگ تبدیل خواهند شد. در انتها برای تعمق بیشتر در دنیای فناوریهای صنعت ساخت، پیشنهاد میشود مقاله "مدیریت فناوریهای دیجیتال در صنعت ساخت" را مطالعه نموده و ویدیو مربوطه را مشاهده نمایید.
نتیجهگیری
دوربینهای RGB-D با ارائه همزمان تصویر رنگی و نقشه عمق، این امکان را فراهم میسازند که برای نخستینبار یک کپی دیجیتال زنده و پیوسته از پروژه داشته باشیم. تلفیق این دادهها با الگوریتمهای هوش مصنوعی و مدل BIM، چرخه «برداشت داده، تحلیل معنایی و اقدام هوشمند» را عملیاتی کرده که نتیجه آن گذار از نظارت واکنشی و مقطعی به نظارت پیشگیرانه و بلادرنگ است. شناخت دقیق سه فناوری اصلی سنجش عمق (نور ساختاریافته، زمان پرواز و دید استریو) و پاسخ به چهار معیار کلیدی (محیط عملیاتی، بودجه، توان پردازش، سرعت تغییرات) برای انتخاب ابزار مناسب ضروری است. در پروژههای بزرگ، ترکیب RGB-D با LIDAR عملکرد بهینهای از نظر برد و جزئیات ارائه میدهد. چالشهای عملی استقرار (گردوغبار، انسداد، سطوح بازتابنده و بار پردازشی) با راهکارهای مهندسی از جمله محفظههای با درجه حفاظت بالا، چیدمان چند دوربین، الگوریتمهای میانیابی و پردازش لبه قابلمدیریت هستند. در نهایت، موفقیت بلندمدت این رویکرد نه به سختافزار، بلکه به ایجاد فرهنگ اعتماد، شفافیت و مسئولیتپذیری دادهمحور وابسته است.
Zhou, C., Ren, D., Zhang, X., Yu, C., & Ju, L. (2022). Human Position Detection Based on Depth Camera Image Information in Mechanical Safety. Advances in Mathematical Physics, 2022(1)
Corcia, V., Dávila, M. A., Golparvar-Fard, M., & Niebles, J. C. (2012). Automated Vision-Based Recognition of Construction Worker Actions for Building Interior Construction Operations Using RGBD Cameras. Construction Research Congress 2012, 879-888
EsFan, J., Ning, Y., Wang, J., Jia, X., Chai, D., Wang, X., & Xu, Y. (2020). EMS-SLAM: Dynamic RGB-D SLAM with Semantic-Geometric Constraints for GNSS-Denied Environments. Remote Sensing, 17(10), 1691
Han, S., Achar, M., Lee, S., & Peña-Mora, F. (2013). Empirical assessment of a RGB-D sensor on motion capture and action recognition for construction worker monitoring. Visualization in Engineering, 1(1), 1
Iadarola, G., Mengarelli, A., Iarlori, S., Monteriu, A., & Spinsante, S. (2020). RGB-D Cameras and Brain-Computer Interfaces for Human Activity Recognition: An Overview. Sensors, 20(20), 1281.
Li, S., Li, D., Zhang, C., Wan, J., & Xie, M. (2020). RGB-D Image Processing Algorithm for Target Recognition and Pose Estimation of Visual Servo System. Sensors, 20(20), 430.
Simundic, V., Mihelcic, D., Svirac, D., Durovic, P., & Cupec, R. (2021). Safety System for Industrial Robots Based on Human Detection Using an RGB-D Camera. 44th International Convention on Information, Communication and Electronic Technology (MIPRO), 1178-1184
Tychola, K. A., Tsimperidis, I., & Papakostas, G. A. (2022). On 3D Reconstruction Using RGB-D Cameras. Digital, 7(7), 401-421
Zimmermann, C., Welschehold, T., Dornhege, C., Burgard, W., & Brox, T. (2018). 3D Human Pose Estimation in RGBD Images for Robotic Task Learning. 2018 IEEE International Conference on Robotics and Automation (ICRA), 1982-1992
دانلود جزئیات این مقاله